1Overview For Simotion D425, D435 and D445 If the user needs to configure an external encoder, the usual practice is to configure two encoders in one drive object, and configure Telegram 106 message for this drive object, which is related to the two encoders. The information is transferred to SimotionD so that the second encoder driven can be configured as an external encoder in Simotion.
Based on the above configuration method of the external encoder, the number of external encoders that can be configured is limited by the number of driving objects carried by SimotionD, and each driving object can only configure the second encoder as an external encoder of Simotion. The above is not possible if the Simotion device used by the user has fewer drive objects but has a larger number of external encoders. Here is a way to configure an external encoder for Simotion D without the need to connect the actual motor module.
If Simotion D425-2, D435-2 and D445-2 are used, the encoder object can be inserted directly into the Sinamics integrated and the encoder information can be transferred to the simotion via the telegram 81/82/83. The external encoder technology object is configured directly in simotion without having to configure the external encoder as described in D425, D435, D445.
2 D425, D435 and D445 without encoder object configuration steps of the external encoder with Simotion D435 without motor module as an example:
2.1 Create a Simotion project and configure the CU320 with its internal integration. See: simotion D Debugging After the configuration is complete, the project is offline.
2.2 Offline project and configure its internal integrated CU320
(1) Double-click "Insert drive" under "SINAMICS_Integrated" to configure a "fake" motor module
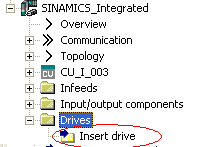
figure 1.
(2) Select control structure
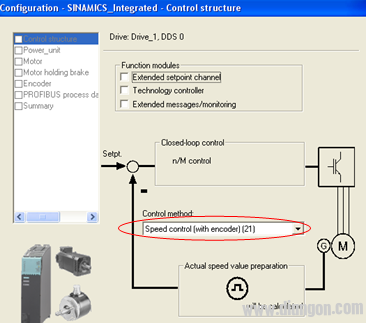
figure 2.
(3) Arbitrarily select a motor module
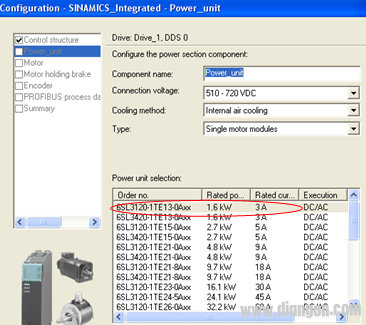
image 3.
(4) Choose a motor arbitrarily
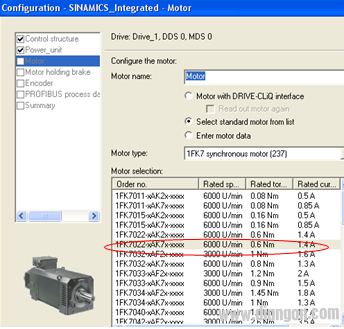
Figure 4.
(5) Select the external encoder type of Simotion connection or select “Enter data†to input the encoder data:
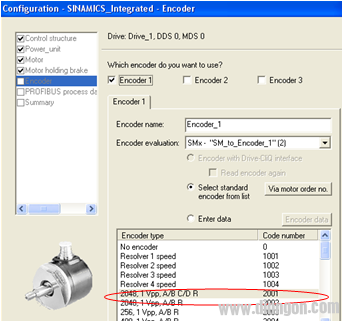
Figure 5.
(6) Select Profidrive control message (SIEMENS telegram 105)
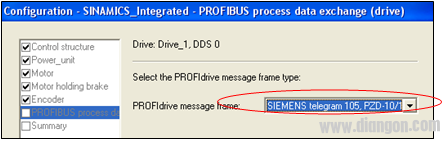
Figure 6.
(7) Modify the configured drive object message "SIEMENS telegram 105" to "Free telegram configuration with BICO".
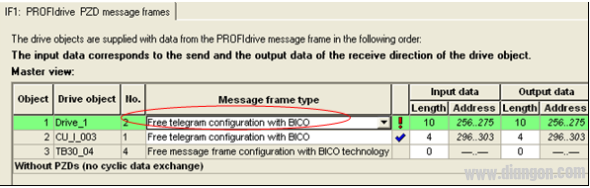
Figure 7.
(8) Remove the control word in the following figure of the drive object message.

Figure 8.
After removing it, as shown in Figure 9:
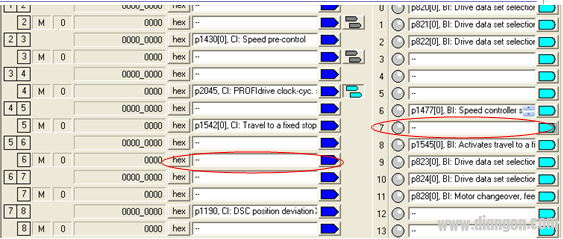
Figure 9.
(9) Click the "Transfer to HW Config" button to retransmit the configuration information to the hardware configuration.
(10) Set the "false" motor module just configured in the topology to the "Does not exit" state.

Figure 10.
(10) Set P125 of this drive object to 2.
2.3 Downloading the Configuration of CU320 Online
2.4 Configuring an external encoder in the D435
(1) Double-click "Insert external encoder" under D435 to insert an external encoder:
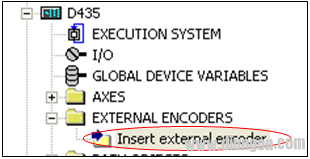
Figure 11.
(2) Name the external encoder:
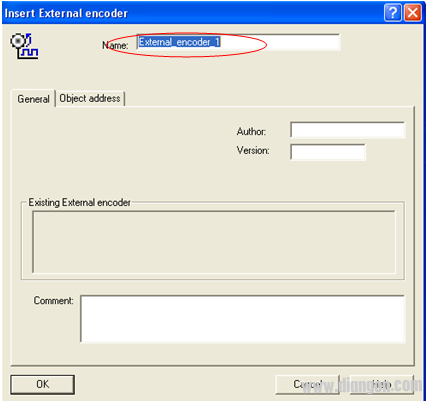
Figure 12.
(3) Select the external encoder type:
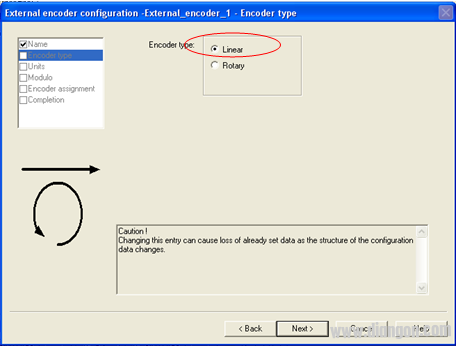
Figure 13.
(4) Select the unit:
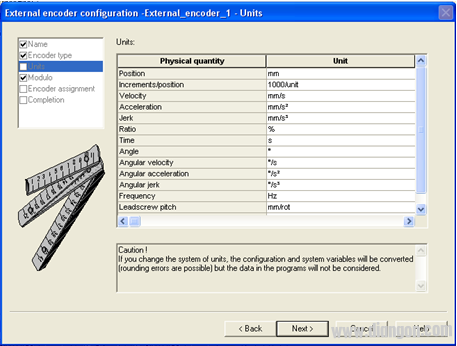
Figure 14.
(5) Set whether to work in modal mode:
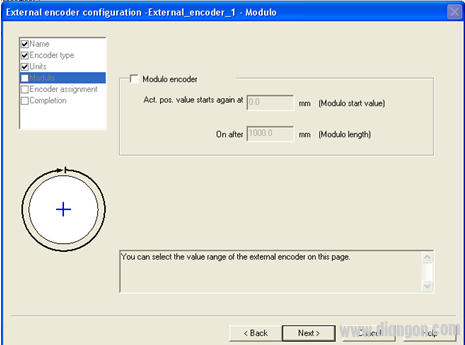
Figure 15.
(6) Assign encoder parameters:
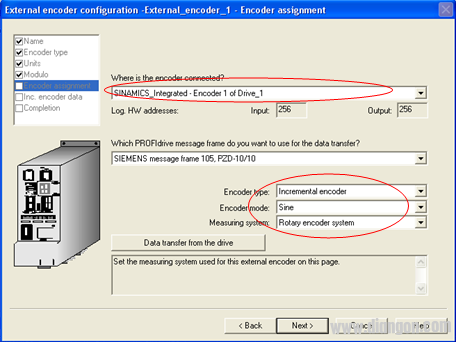
Figure 16.
(7) Set the encoder parameters:
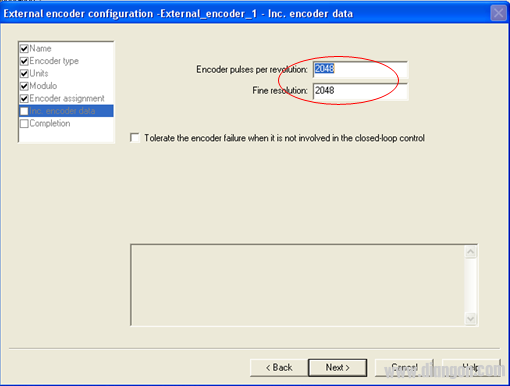
Figure 17.
(8) Prepare an external encoder control program:
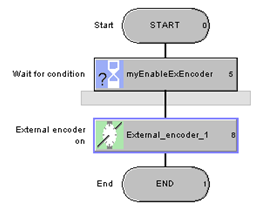
Figure 18.
2.5 Restrictions
(1) The number of external encoders per "fake" drive can be configured for up to two encoders per "false" drive, using the message SIEMENS Telegram 106.
(2) DMC20 DRIVE-CLiQ Hub
The DMC 20 can be used to connect multiple external encoders. The configuration is done by the above method, but attention should be paid to the performance requirements. Only up to 6 servo speed axes can be configured for each CU.
3 D425-2, D435-2 and D445-2 The configuration procedure of the external encoder without the drive object is configured by taking the Simotion D445-2 without the motor module as an example:
3.1 Creating a Simotion project and automating the configuration of the internally integrated CU320-2 The project is offline.
3.2 Offline project and configure the encoder object in the CU
(1) Double-click "SINAMICS_Integrated-> Encoder-> Insert encoder" to insert an encoder object:
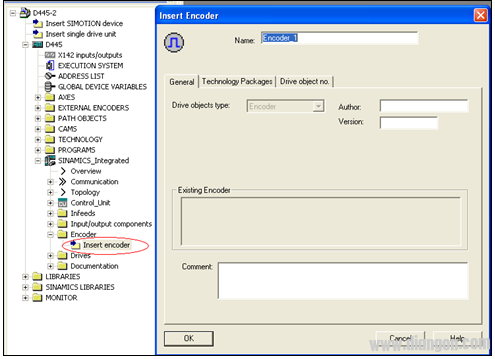
Figure 19.
(2) Select the type of encoder to be connected:
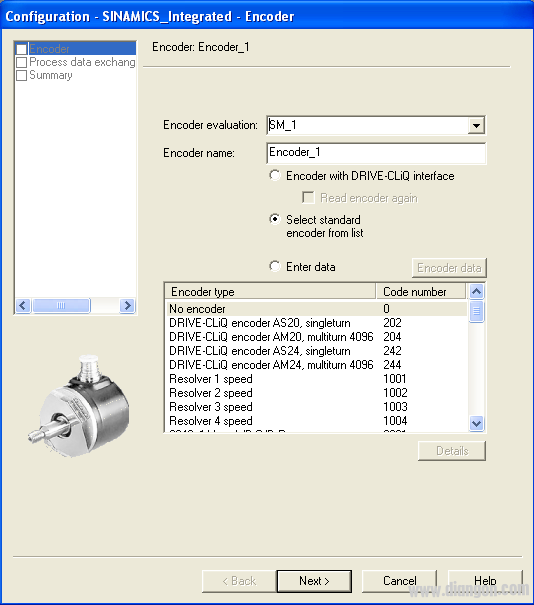
Figure 20.
(3) Select the communication method:

Figure 21.
(4) Adjust the topology connection according to the actual connection of the encoder:
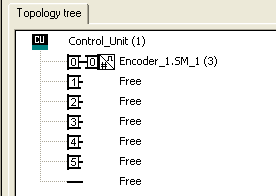
Figure 21.
3.3 Configuring an external encoder technology object in Simotion
(1) Double-click "D445-> EXTERNAL ENCODER-> Insert external encoder" to insert an external encoder:

Figure 22.
(2) Select the external encoder type:

Figure 23.
(3) Assign the encoder in the Sinamics integrated configuration to the external encoder technology object:
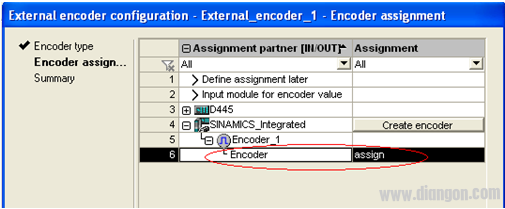
Figure 24.
(4) Configured external encoder technology objects:
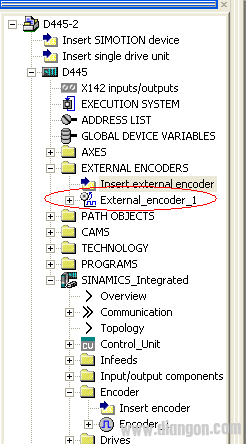
Figure 25.
Two mutually perpendicular reflecting surfaces are called ridge surfaces, and prisms with ridge surfaces are called ridge prisms.
The ridge prism is small in volume and can make the objective lens and eyepiece in a straight line, so it is often used for extremely compact binocular lens.

Roof Prism,Roof Penta Prism,Optical Roof Penta Prism,K9 Roof Prism
Hanzhong Hengpu Photoelectric Technology Co.,Ltd , https://www.hplenses.com