1 Introduction The smart car system is a time-varying and non-linear system. The single feedback control using the traditional PID algorithm will cause the system to have different degrees of overshoot and oscillation, and the ideal control effect cannot be obtained. In this paper, the feedforward control is introduced into the control of the smart car system, which effectively improves the real-time performance of the system and improves the response speed of the system [1]. According to the characteristics of the smart car system, the digital PID algorithm is improved and introduced. The differential first and incomplete differential links improve the dynamic characteristics of the system. At the same time, the fuzzy control has the characteristics of being insensitive to parameter changes and robust [2]. This paper combines the fuzzy algorithm with the PID algorithm, effectively Improve the adaptability and robustness of the smart car and improve the control performance of the system.
2 Improved PID algorithm The control of the smart car is done by Freescale's S12 chip, so the control of the smart car should use computer control. In view of the particularity of smart car control, this paper makes some improvements to the traditional digital PID algorithm, which can better meet the needs of smart car control.
2.1 does not completely differentiate PID
Introducing the differential link into the direction and speed control of the smart car significantly improves the dynamic performance of the system, but it is also particularly sensitive to sudden changes in error and has a certain adverse effect on the stability of the system. In order to overcome the above shortcomings, this paper adds a first-order inertia link [3] to the PID algorithm. The structure of the incomplete differential PID algorithm is shown in Figure 1. 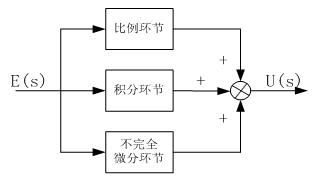
This article refers to the address: http://
Figure 1 Incompletely differentiated PID algorithm mechanism diagram The first-order inertia link is directly added to the differential link, and the transfer function of the system can be obtained as follows:  (1)
(1)
Deriving and arranging the differential term of equation (1), the equation is as follows:  (2)
(2)
Where, a constant determined by the time constant of the system and the time constant of the first-order inertia link.
For programming convenience, you can write 2-2 as follows:
 (3)
(3)
In the formula,  .
.
Analysis (3) shows that after the introduction of incomplete differentiation, the differential output is reduced in the first sampling period, and then attenuated according to a certain ratio [3][4]. Experiments show that the incomplete differentiation effectively overcomes the adverse effects of the deviation of the smart car on the speed control and has better control effect. Figure 2 is a flow chart of the program of the incomplete differential PID algorithm.
2.2 Differential Pilot PID
Since the smart car often encounters turning when running on the runway, the speed set value and the direction set value of the smart car will change frequently, causing the system to oscillate. In order to solve the adverse effects of the frequent changes of the set value, this paper introduces the differential leading PID algorithm in the speed and direction control of the smart car, which is characterized by only the output quantity is differentiated, that is, only the speed measurement value and The steering deflection is differentiated without differentiating the speed and direction settings. In this way, when the set value changes, the output does not change, and the change of the controlled amount is relatively moderate, which avoids the oscillation caused by frequent changes of the set value to the system. Improved dynamic performance of the system.
FIG. 3 is a structural diagram of differential prior PID control, and the differential control formula of the differential advance is as follows.  (4)
(4)
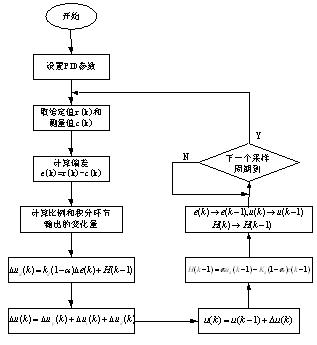
Figure 2 Program flow chart of the incomplete differential PID algorithm 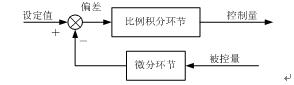
Figure 3 Differential pre-positioning PID control structure
3 Application of feedforward control Because the track width of the smart car is limited, when the sharp turn is made, if the speed and direction control are not timely, the smart car may rush out of the runway. Since the feedforward control is open loop control, the response of the feedforward control is fast. Introducing feedforward control into the control of the smart car can improve the reaction speed of the steering gear and the servo motor and improve the dynamic performance of the smart car system.
3.1 Intelligent car control system structure The control of smart car is mainly reflected in two aspects: one is the direction control, that is, the control of the steering gear; the other is the control of the speed, that is, the control of the servo motor. The mathematical model of the steering gear is relatively simple, with good linear characteristics, only feedforward control; the speed control of the smart car is relatively complicated, the speed model can not be accurately established, and the feedforward-improved PID algorithm is used for control. The structure of the control system of the smart car is shown in Figure 4.
In Fig. 4, and are the mathematical models of the servo and servo motor, respectively. As can be seen from the figure, the direction control and speed control of the smart car are independent of each other, and they are all determined by the route deviation. The correspondence between the steering angle of the steering gear and the deviation of the route is obtained according to the mathematical model of the steering gear. In the speed control loop, both the feedback loop and the feedforward link are included. The control amount of the servo motor is based on the feedforward compensation. Then calculated by the incremental PID algorithm.
Figure 4 Control system structure of the smart car
3.2 Application in Direction Control There are two requirements for the direction control of the smart car: on the straight track, the direction remains stable; at the turn, the direction change is required to be accurate and rapid. Only in this way can the smart car be operated at high speed and stably on the runway. In order to improve the robustness of directional control, the paper also obfuscates the route deviation. Fig. 5 is a structural diagram of the fuzzy feedforward control of the smart car direction, and the feedforward control function in the case of the straight track and the curve respectively. 
Figure 5 Structure diagram of the smart car direction control system
3.3 Application in speed control In order to make the smart car run faster on the straight road, when the smart car is prevented from rushing out of the runway during cornering, the speed of the smart car must be reduced, which requires the speed control system of the smart car to have Very good acceleration and deceleration performance. When the smart car passes through the continuously turning runway, the frequent change of the route deviation will cause frequent changes in the speed setting, which will cause the oscillation of the speed control system, and the differential link is sensitive to the sudden change of the error, which is easy to cause instability of the system. In order to solve the above problems, this paper improves the digital PID algorithm, introduces incomplete differentiation and differential first into the PID algorithm, and greatly improves the dynamic performance of the speed control system.
Figure 6 Schematic diagram of the speed control system of the smart car Figure 6 is the structure diagram of the speed control system of the smart car. Because the road conditions and the attitude of the smart car will change frequently, the model of the speed control system is also uncertain. In order to improve the adaptability of the system, the fuzzy PID algorithm is adopted in the speed control system. The speed setting and the actual speed are fuzzy binned [5][6], and the relatively optimal PID parameters in different situations are obtained through debugging, which ensures that the speed control system has better control effects under different conditions.
4 Conclusions The feedforward-improved PID algorithm proposed in this paper is an effective method for smart car control. This algorithm not only has good dynamic performance and response speed, but also improves the adaptability and robustness of the system and makes the intelligence The car can run at a faster speed on different runways. Experiments show that the proposed control algorithm effectively improves the performance of the smart car. When running on the same runway, the speed of the smart car using the new algorithm is higher than that of the smart car using the traditional PID algorithm. The average time of the circle is reduced by 3.2 seconds, and the algorithm proposed in this paper also improves the stability of the smart car operation and improves the adaptability of the smart car to the runway. This method has a good application prospect.
32mm Push Button,Plastic Push Button,32mm Push Button,Wireless Push Button
Guangzhou Ruihong Electronic Technology CO.,Ltd , https://www.callegame.com